








空間機器人自主操控理論和技術研究
近日,機器人學國家重點實驗室、中科院“空間自主操控創(chuàng)新交叉團隊”的研究人員,針對不具備抓捕特征的空間非合作目標,提出了一種機器人化“鎖籠對”的捕獲方法,相關成果發(fā)表于機械電子領域頂級期刊IEEE/ASME Transactions on Mechatronics (DOI: 10.1109/TMECH.2019.2952552)。
在強輻射、超低溫、高真空、微重力的太空環(huán)境中,空間機器人可以代替或協(xié)助航天員去執(zhí)行空間任務;與航天員就位作業(yè)相比,空間機器人在成本、安全性以及作業(yè)時間等方面具有明顯優(yōu)勢。機器人自主操控技術是空間機器人研究需要解決的核心技術。以空間自由移動目標的在軌服務為例,目標可靠捕獲是后續(xù)操作任務的技術基礎。
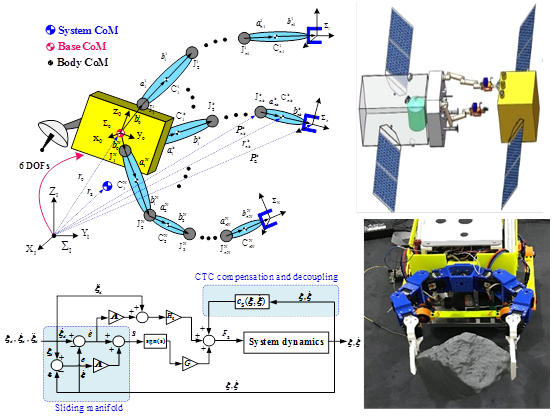
為此,中科院沈陽自動化所張鑫、劉金國等人提出了采用雙臂空間機器人實現(xiàn)鎖籠對的捕獲方法,該方法的核心思想是將目標限定在有限的封閉空間之中,即機器人化鎖籠中;并提出鎖困兼容性概念以及相應的性能指標,用于定量地描述鎖籠對方法的捕獲能力。
基于該性能指標,進一步提出一種雙臂空間機器人預捕獲構型的規(guī)劃算法,以獲得最優(yōu)捕獲能力。最后,搭建氣浮式空間機器人實驗平臺,通過實驗驗證所提出的捕獲方法的有效性。該研究成果在未來在軌維護維修、太空環(huán)境治理、空間碎片清除等任務中有重要的實用價值。
近年來,在國家重點研發(fā)計劃、國家萬人計劃、中科院創(chuàng)新交叉團隊、機器人學國家重點實驗室自主課題等資助下,面向國家飛行器在軌服務重大任務需求,圍繞空間機器人自主操控技術,沈陽自動化所科研人員在空間機器人在軌捕獲、在軌加注、智能控制、空間人機交互等方面取得了重要進展,相關成果發(fā)表于IEEE Trans. on Cybernetics,IEEE Trans. on Industrial Electronics, IEEE/ASME Trans. on Mechatronics, Nonlinear Dynamics, Acta Astronautica,Science China Technological Sciences, Chinese Journal of Aeronautics等期刊。
沒有賬號?請注冊會員






